Analysis of the effects of surface stiffness on the contact interaction between a finger and a cylindrical handle using a three-dimensional hybrid model
Supporting Files

-
Apr 13 2014
-
Details
-
Alternative Title:Med Eng Phys
-
Personal Author:
-
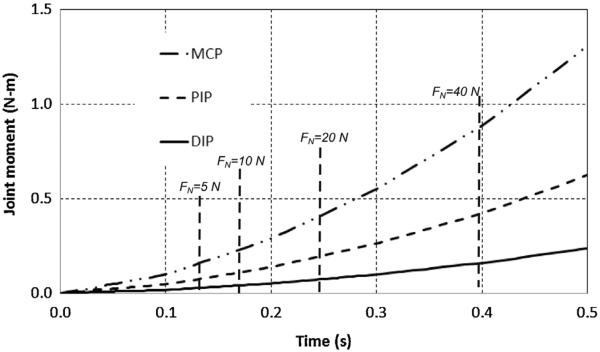
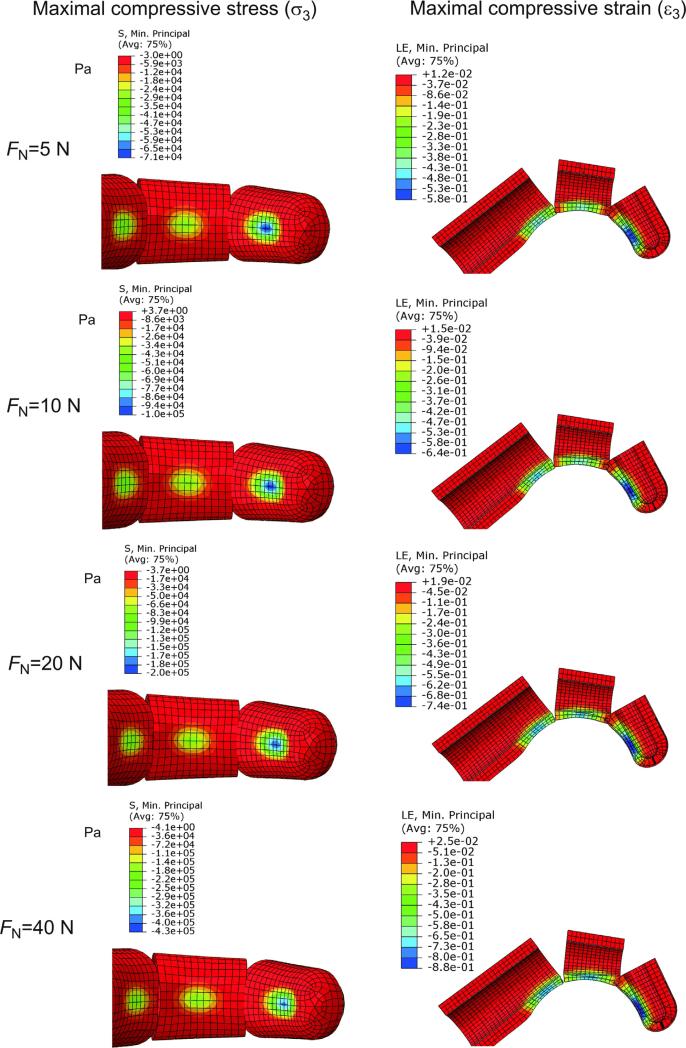
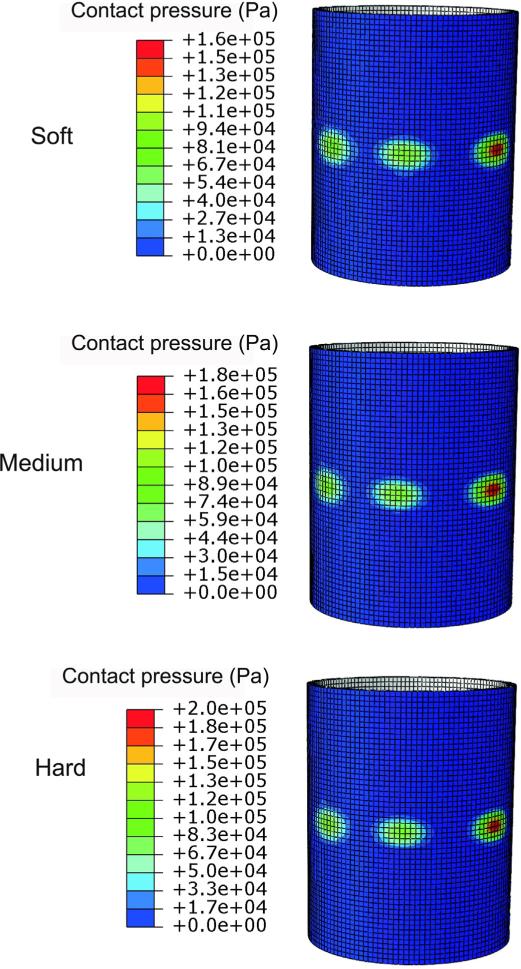
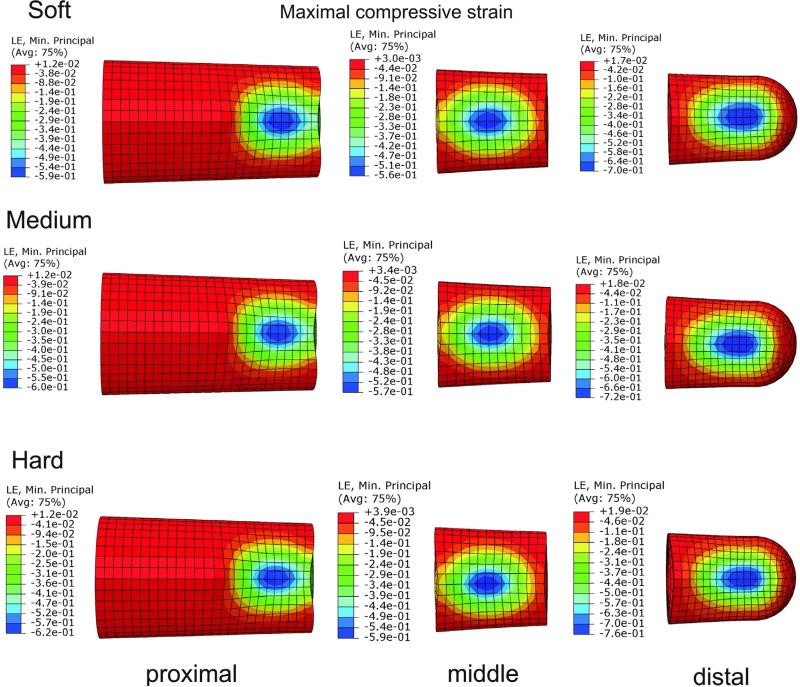
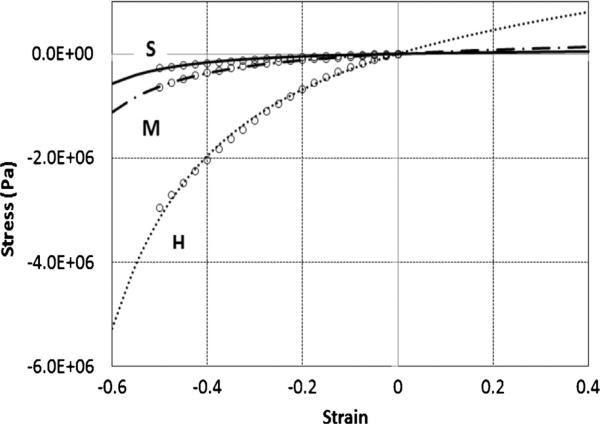
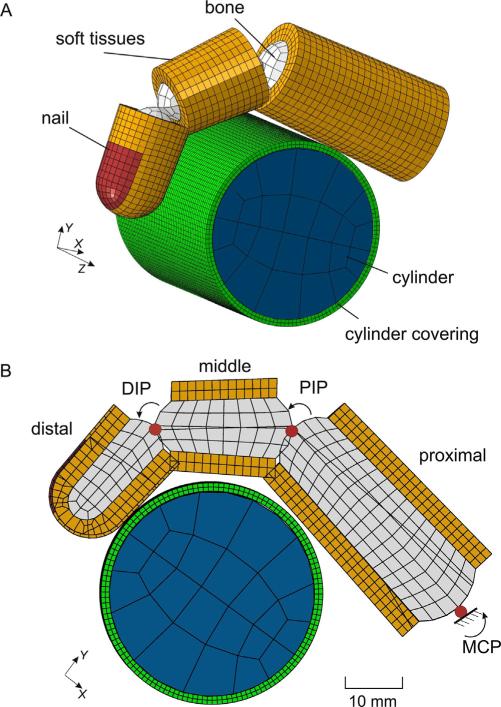
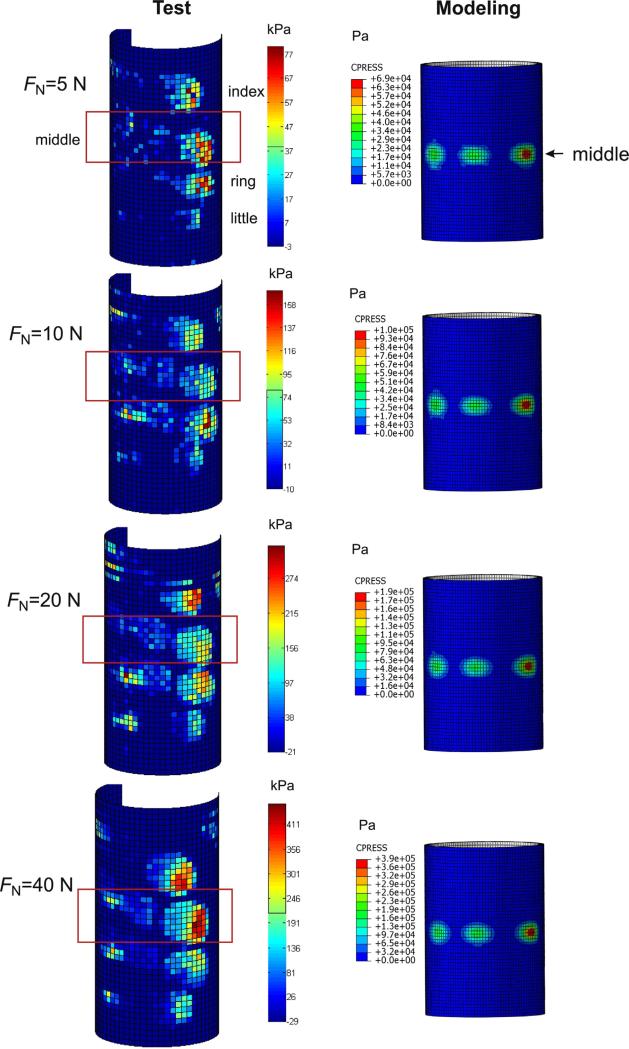
Description:Contact interactions between the hand and handle, such as the contact surface softness and contact surface curvature, will affect both physical effort and musculoskeletal fatigue, thereby the comfort and safety of power tool operations. Previous models of hand gripping can be categorized into two groups: multi-body dynamic models and finite element (FE) models. The goal of the current study is to develop a hybrid FE hand gripping model, which combines the features of conventional FE models and multi-body dynamic models. The proposed model is applied to simulate hand-gripping on a cylindrical handle with covering materials of different softness levels. The model included three finger segments (distal, middle, and proximal phalanxes), three finger joints (the distal interphalangeal (DIP), proximal interphalangeal (PIP), and metacarpophalangeal (MCP) joint), and major anatomical substructures. The model was driven by joint moments, which are the net effects of all passive and active muscular forces acting about the joints. The finger model was first calibrated by using experimental data of human subject tests, and then applied to investigate the effects of surface softness on contact interactions between a finger and a cylindrical handle. Our results show that the maximal compressive stress and strain in the soft tissues of the fingers can be effectively reduced by reducing the stiffness of the covering material.
-
Subjects:
-
Source:Med Eng Phys. 36(7):831-841.
-
Pubmed ID:24736020
-
Pubmed Central ID:PMC4573534
-
Document Type:
-
Funding:
-
Volume:36
-
Issue:7
-
Collection(s):
-
Main Document Checksum:urn:sha256:3f79e2d77ffb3379f5fe74f9d70de97d4eea688cee1e317aa4915c4e769df7a3
-
Download URL:
-
File Type:
 [PDF
- 3.52 MB
]
[PDF
- 3.52 MB
]
Supporting Files

ON THIS PAGE

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
CDC STACKS serves as an archival repository of CDC-published products including
scientific findings,
journal articles, guidelines, recommendations, or other public health information authored or
co-authored by CDC or funded partners.
As a repository, CDC STACKS retains documents in their original published format to ensure public access to scientific information.
As a repository, CDC STACKS retains documents in their original published format to ensure public access to scientific information.
You May Also Like
COLLECTION
CDC Public Access