A Lightweight Robotic Leg Prosthesis Replicating the Biomechanics of the Knee, Ankle, and Toe Joint
Supporting Files

-
11 23 2022
-
File Language:
English
Details
-
Alternative Title:Sci Robot
-
Personal Author:
-
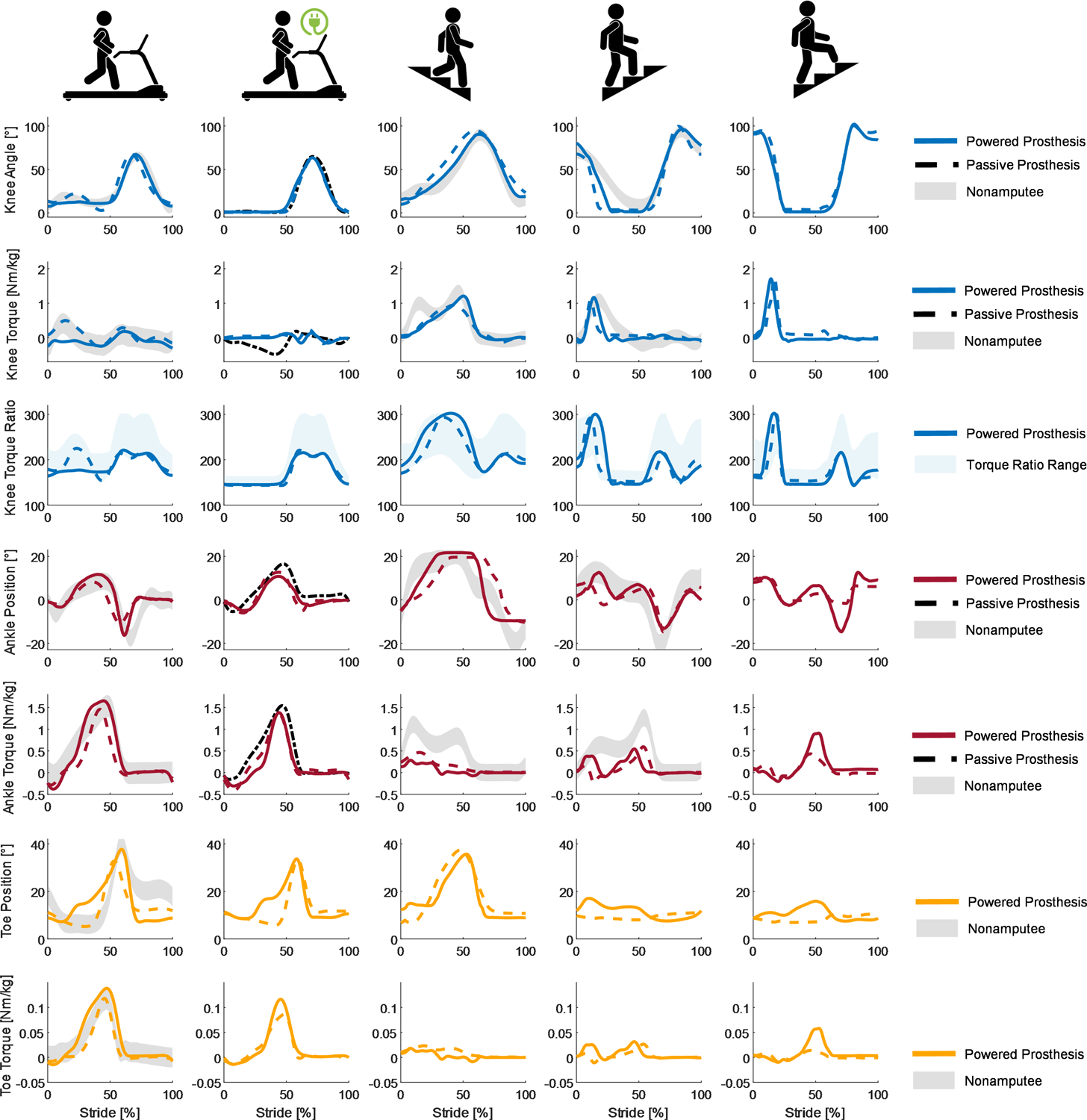
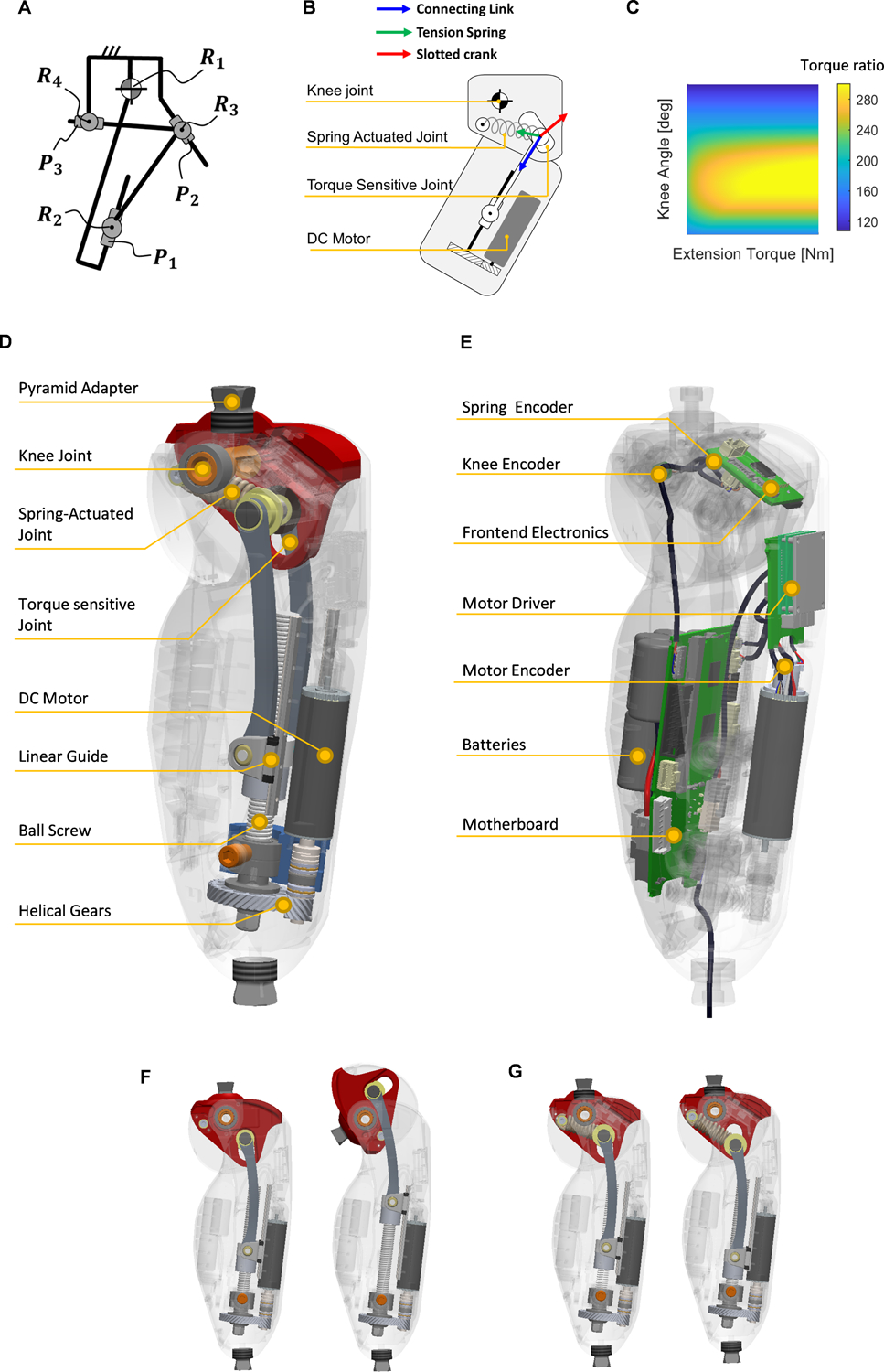
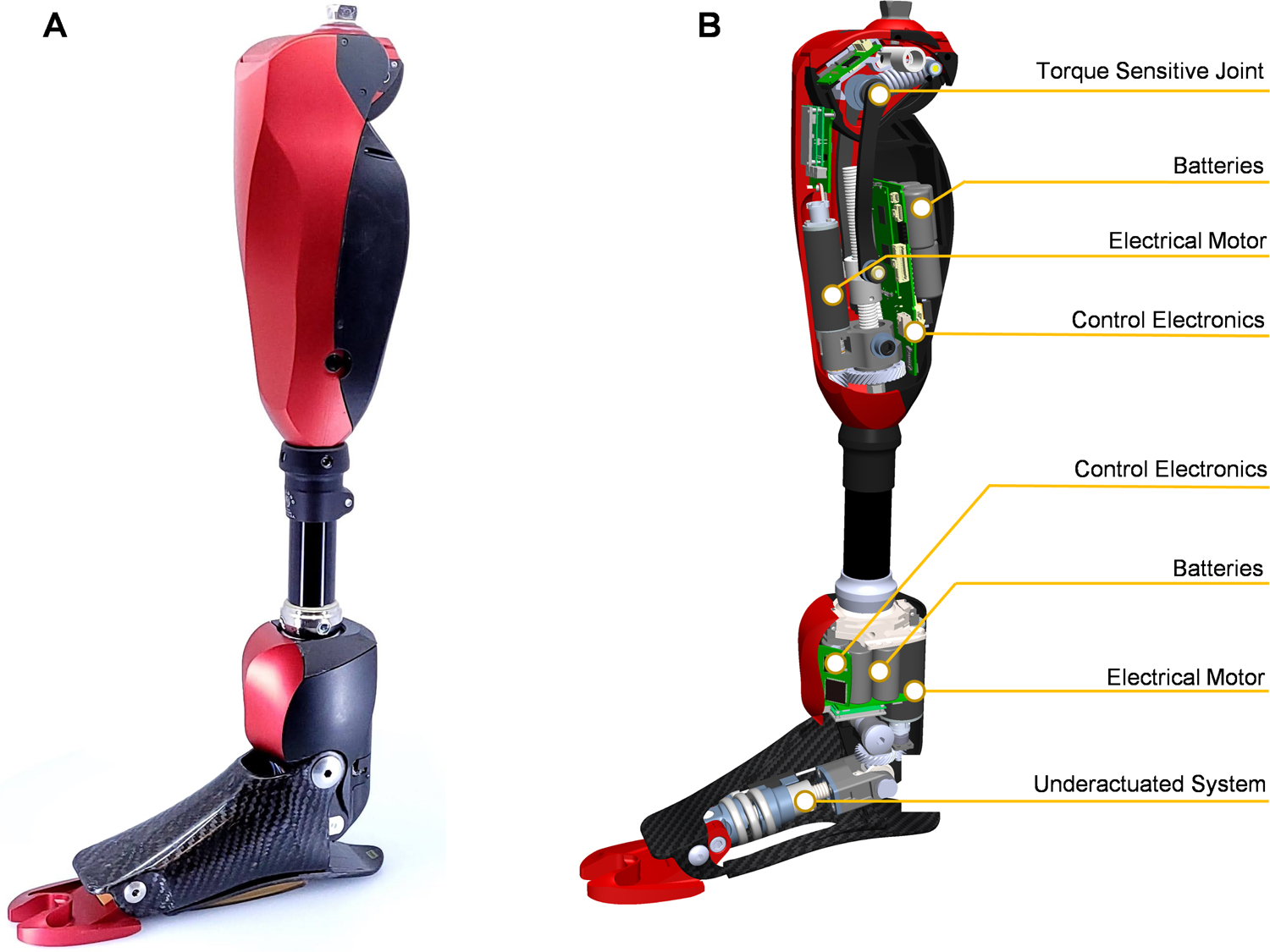
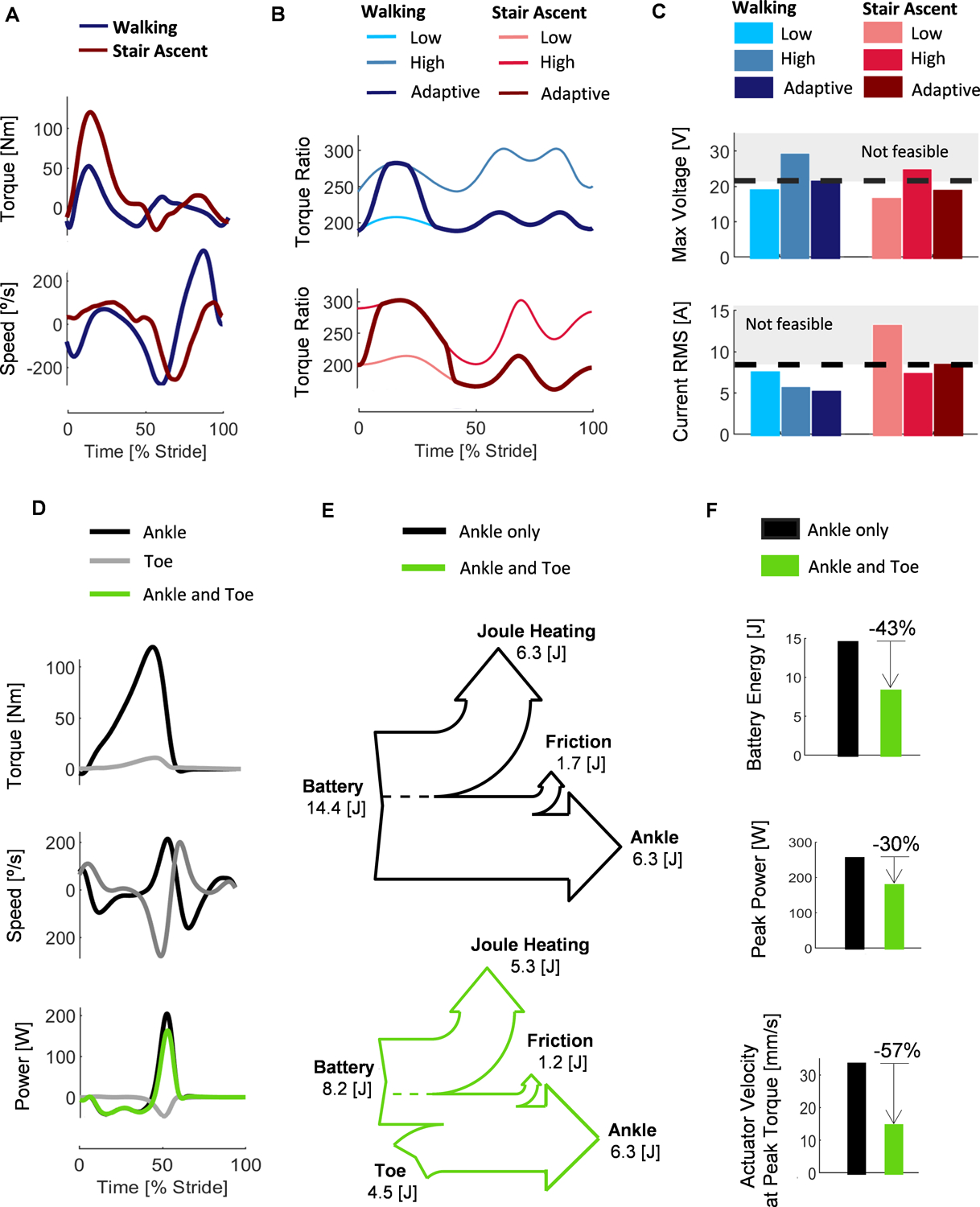
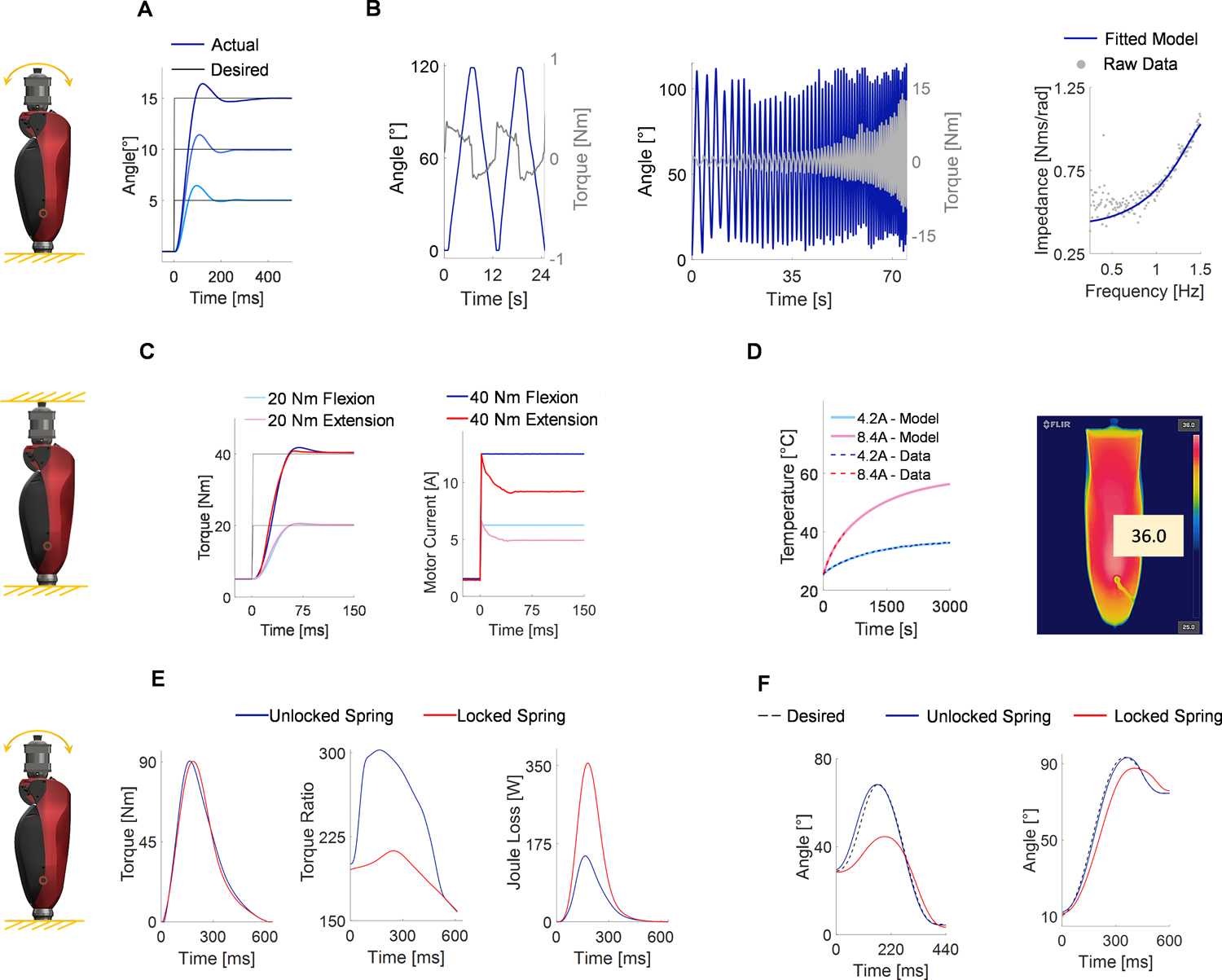
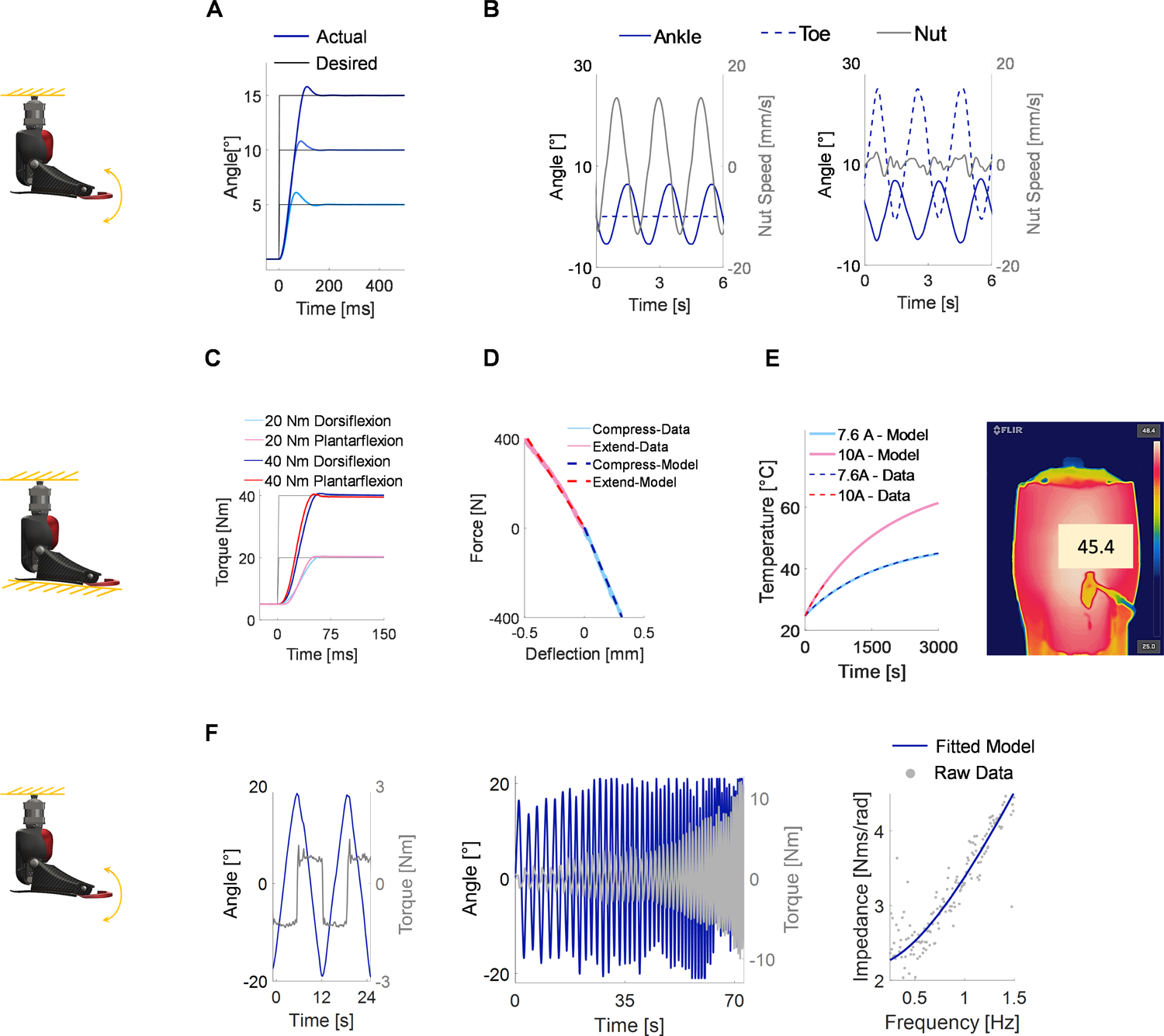
Description:Robotic leg prostheses promise to improve the mobility and quality of life of millions of individuals with lower-limb amputations by imitating the biomechanics of the missing biological leg. Unfortunately, existing powered prostheses are much heavier and bigger and have shorter battery life than conventional passive prostheses, severely limiting their clinical viability and utility in the daily life of amputees. Here, we present a robotic leg prosthesis that replicates the key biomechanical functions of the biological knee, ankle, and toe in the sagittal plane while matching the weight, size, and battery life of conventional microprocessor-controlled prostheses. The powered knee joint uses a unique torque-sensitive mechanism combining the benefits of elastic actuators with that of variable transmissions. A single actuator powers the ankle and toe joints through a compliant, underactuated mechanism. Because the biological toe dissipates energy while the biological ankle injects energy into the gait cycle, this underactuated system regenerates substantial mechanical energy and replicates the key biomechanical functions of the ankle/foot complex during walking. A compact prosthesis frame encloses all mechanical and electrical components for increased robustness and efficiency. Preclinical tests with three individuals with above-knee amputation show that the proposed robotic leg prosthesis allows for common ambulation activities with close to normative kinematics and kinetics. Using an optional passive mode, users can walk on level ground indefinitely without charging the battery, which has not been shown with any other powered or microprocessor-controlled prostheses. A prosthesis with these characteristics has the potential to improve real-world mobility in individuals with above-knee amputation.
-
Subjects:
-
Source:Sci Robot. 7(72):eabo3996
-
Pubmed ID:36417500
-
Pubmed Central ID:PMC9894662
-
Document Type:
-
Funding:
-
Volume:7
-
Issue:72
-
Collection(s):
-
Main Document Checksum:urn:sha-512:a7fbb008149a16406b05e3c4b10876723205f6a953a9bbe7d753d19e2403c8cfb5f0e0f932353c8fb520b92116576dcd8854751a35ba4ac25ee022d36356c6c0
-
Download URL:
-
File Type:
 [PDF
- 1.82 MB
]
[PDF
- 1.82 MB
]
Supporting Files

File Language:
English
ON THIS PAGE

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
CDC STACKS serves as an archival repository of CDC-published products including
scientific findings,
journal articles, guidelines, recommendations, or other public health information authored or
co-authored by CDC or funded partners.
As a repository, CDC STACKS retains documents in their original published format to ensure public access to scientific information.
As a repository, CDC STACKS retains documents in their original published format to ensure public access to scientific information.
You May Also Like
COLLECTION
CDC Public Access