Measuring upper arm elevation using an inertial measurement unit: An exploration of sensor fusion algorithms and gyroscope models
Supporting Files

-
11 2020
File Language:
English
Details
-
Alternative Title:Appl Ergon
-
Personal Author:
-
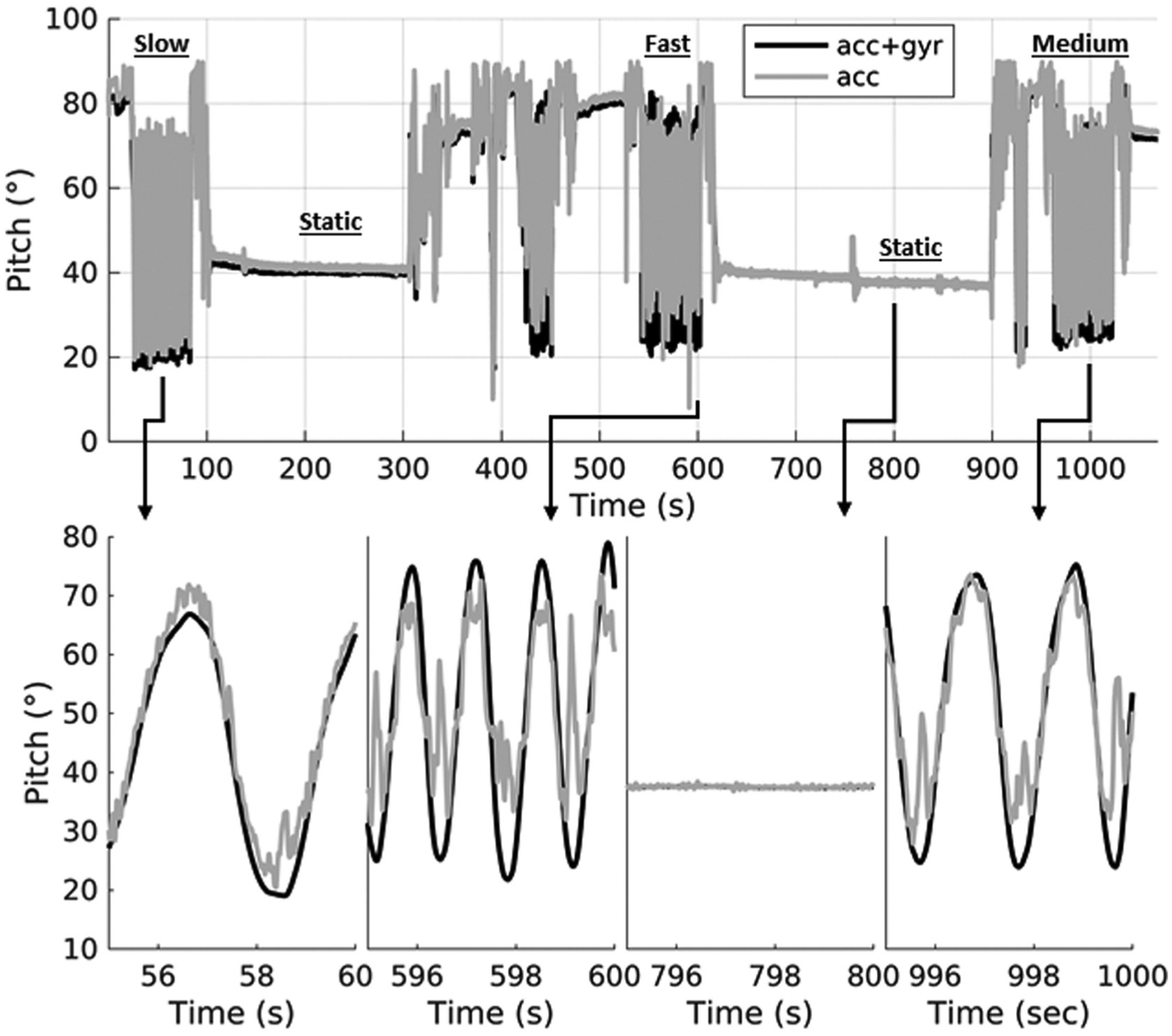
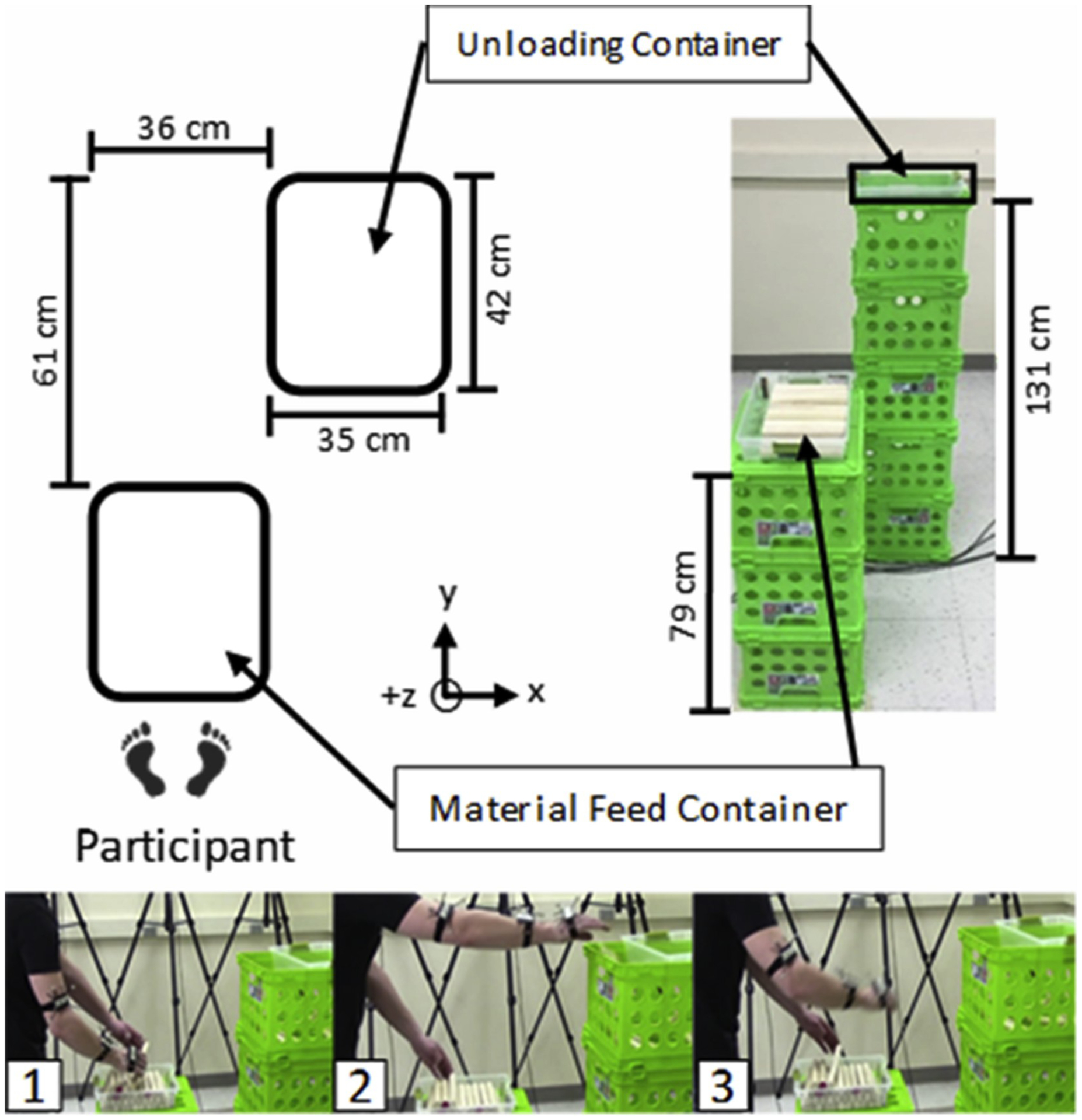
Description:Many sensor fusion algorithms for analyzing human motion information collected with inertial measurement units have been reported in the scientific literature. Selecting which algorithm to use can be a challenge for ergonomists that may be unfamiliar with the strengths and limitations of the various options. In this paper, we describe fundamental differences among several algorithms, including differences in sensor fusion approach (e.g., complementary filter vs. Kalman Filter) and gyroscope error modeling (i.e., inclusion or exclusion of gyroscope bias). We then compare different sensor fusion algorithms considering the fundamentals discussed using laboratory-based measurements of upper arm elevation collected under three motion speeds. Results indicate peak displacement errors of <4.5° with a computationally efficient, non-proprietary complementary filter that did not account for gyroscope bias during each of the one-minute trials. Controlling for gyroscope bias reduced peak displacement errors to <3.0°. The complementary filters were comparable (<1° peak displacement difference) to the more complex Kalman filters.
-
Subjects:
-
Keywords:
-
Source:Appl Ergon. 89:103187
-
Pubmed ID:32854821
-
Pubmed Central ID:PMC9605636
-
Document Type:
-
Funding:
-
Volume:89
-
Collection(s):
-
Main Document Checksum:urn:sha-512:d0470622b0598708b242f6a68ef2071587817b2b27f6cc726e9327d3080996905221c074ded97c6b477f777f21fdf99f42d20ddd750a4a0f52e3f45d5cff2c12
-
Download URL:
-
File Type:
 [PDF
- 1004.14 KB
]
[PDF
- 1004.14 KB
]
Supporting Files

File Language:
English
ON THIS PAGE

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
CDC STACKS serves as an archival repository of CDC-published products including
scientific findings,
journal articles, guidelines, recommendations, or other public health information authored or
co-authored by CDC or funded partners.
As a repository, CDC STACKS retains documents in their original published format to ensure public access to scientific information.
As a repository, CDC STACKS retains documents in their original published format to ensure public access to scientific information.
You May Also Like
COLLECTION
CDC Public Access