Accuracy of angular displacements and velocities from inertial-based inclinometers
Supporting Files

-
2 2018
File Language:
English
Details
-
Alternative Title:Appl Ergon
-
Personal Author:
-
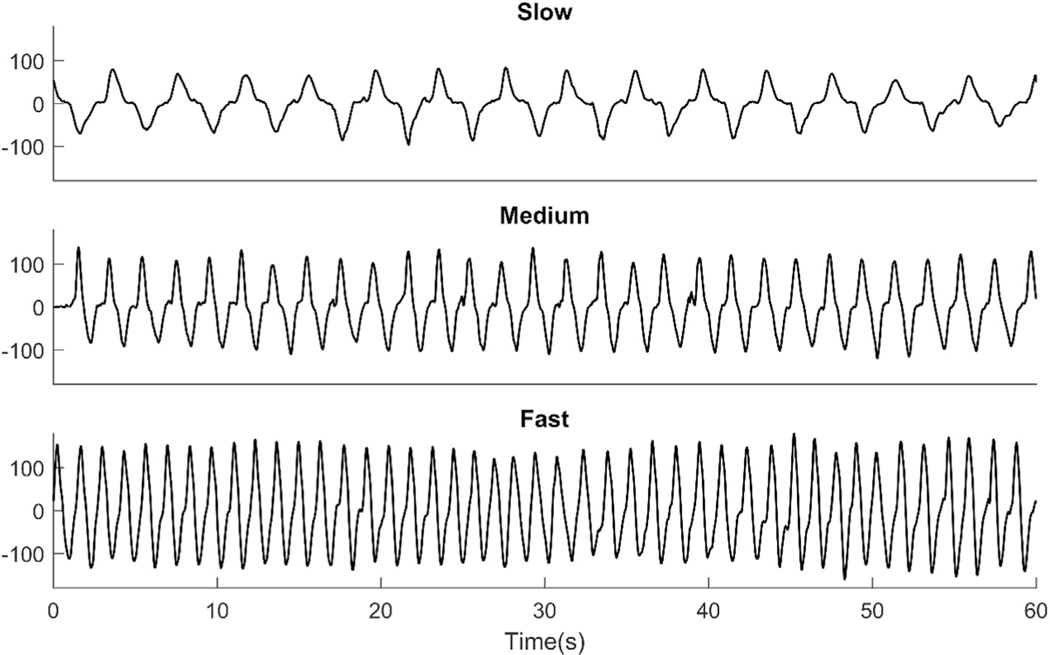
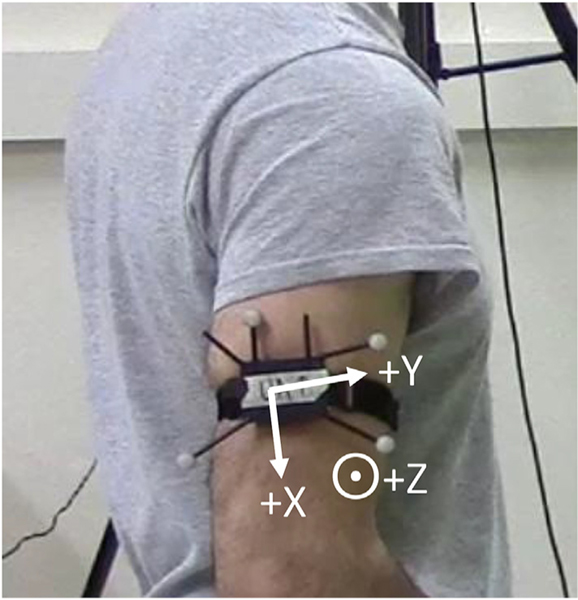
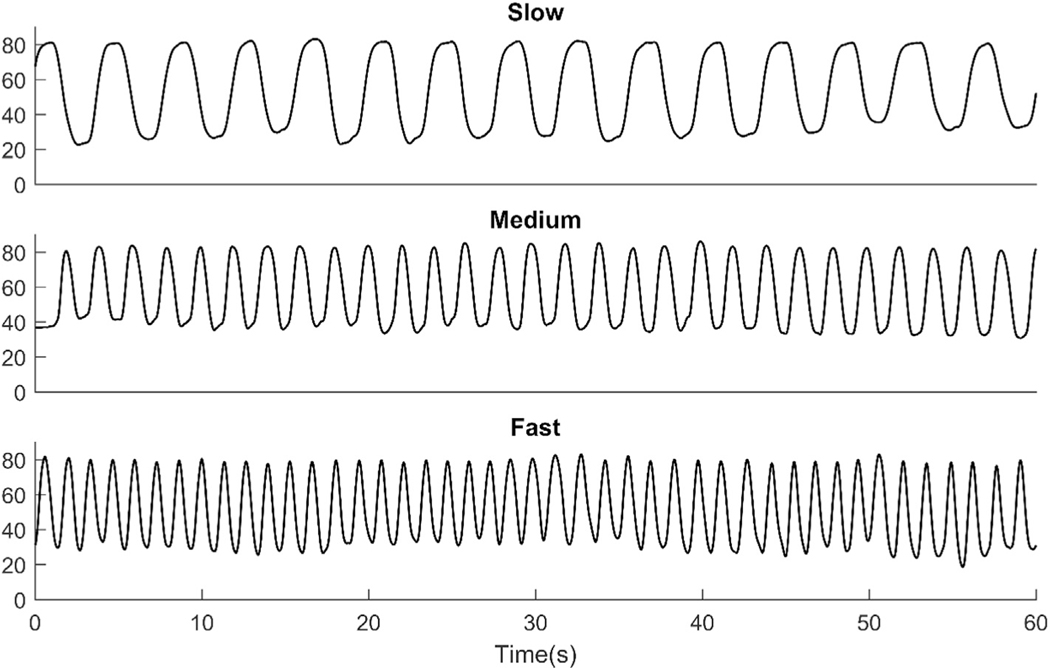
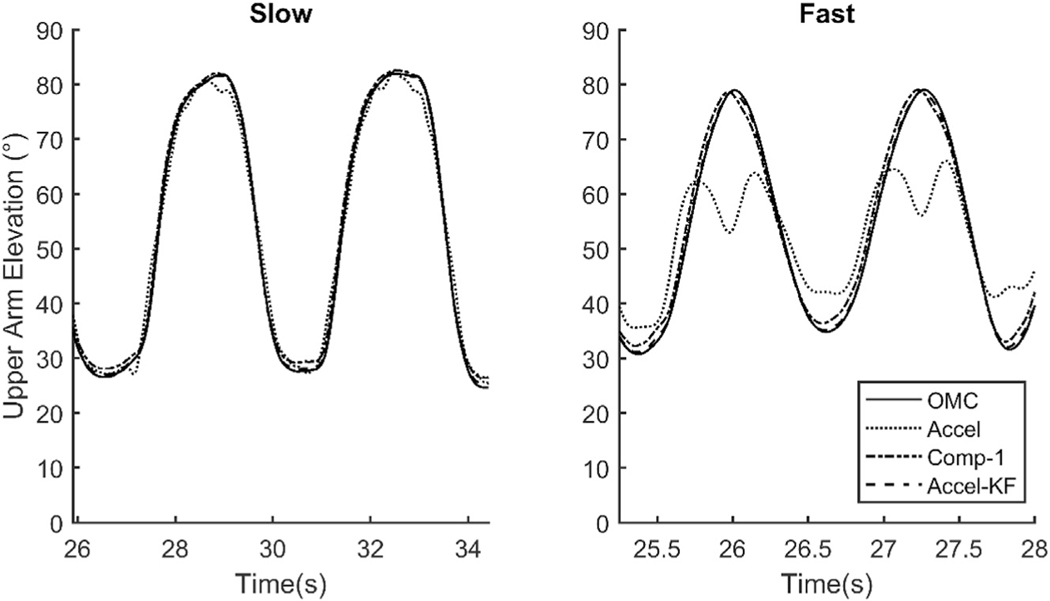
Description:The objective of this study was to evaluate the accuracy of various sensor fusion algorithms for measuring upper arm elevation relative to gravity (i.e., angular displacement and velocity summary measures) across different motion speeds. Thirteen participants completed a cyclic, short duration, arm-intensive work task that involved transfering wooden dowels at three work rates (slow, medium, fast). Angular displacement and velocity measurements of upper arm elevation were simultaneously measured using an inertial measurement unit (IMU) and an optical motion capture (OMC) system. Results indicated that IMU-based inclinometer solutions can reduce root-mean-square errors in comparison to accelerometer-based inclination estimates by as much as 87%, depending on the work rate and sensor fusion approach applied. The findings suggest that IMU-based inclinometers can substantially improve inclinometer accuracy in comparison to traditional accelerometer-based inclinometers. Ergonomists may use the non-proprietary sensor fusion algorithms provided here to more accurately estimate upper arm elevation.
-
Subjects:
-
Source:Appl Ergon. 67:151-161
-
Pubmed ID:29122186
-
Pubmed Central ID:PMC9605618
-
Document Type:
-
Funding:
-
Volume:67
-
Collection(s):
-
Main Document Checksum:urn:sha256:237d06493f66a78592c730da662756b25a9af96286eaac686e9014cf4355b533
-
Download URL:
-
File Type:
 [PDF
- 2.59 MB
]
[PDF
- 2.59 MB
]
Supporting Files

File Language:
English
ON THIS PAGE

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
CDC STACKS serves as an archival repository of CDC-published products including
scientific findings,
journal articles, guidelines, recommendations, or other public health information authored or
co-authored by CDC or funded partners.
As a repository, CDC STACKS retains documents in their original published format to ensure public access to scientific information.
As a repository, CDC STACKS retains documents in their original published format to ensure public access to scientific information.
You May Also Like
COLLECTION
CDC Public Access