An evaluation of the contact forces on the fingers when squeezing a spherical rehabilitation ball
Supporting Files

-
2018
-
File Language:
English
Details
-
Journal Article:Biomed Mater Eng
-
Personal Author:
-
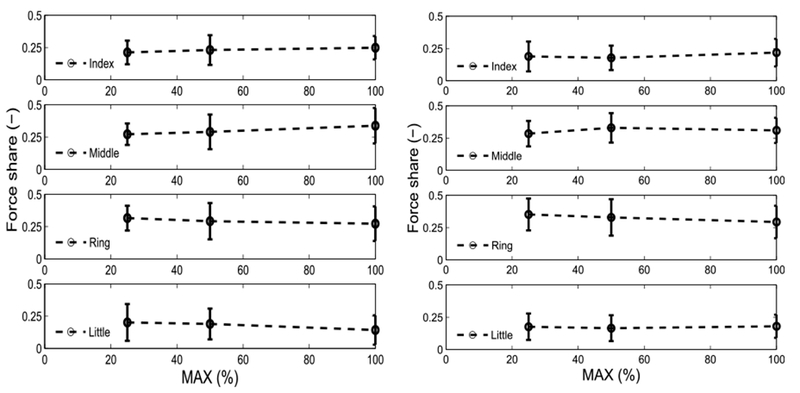
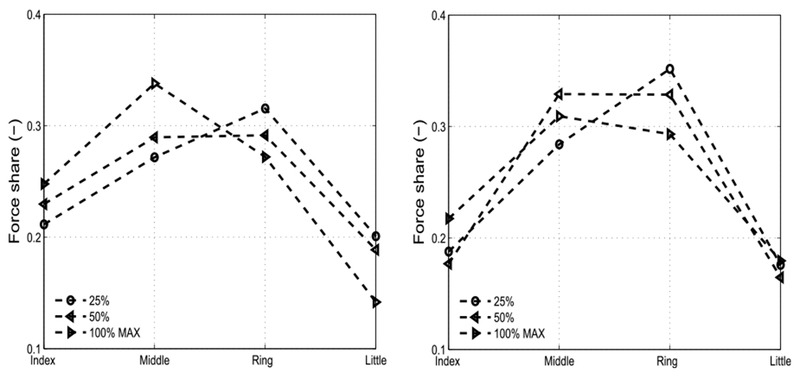
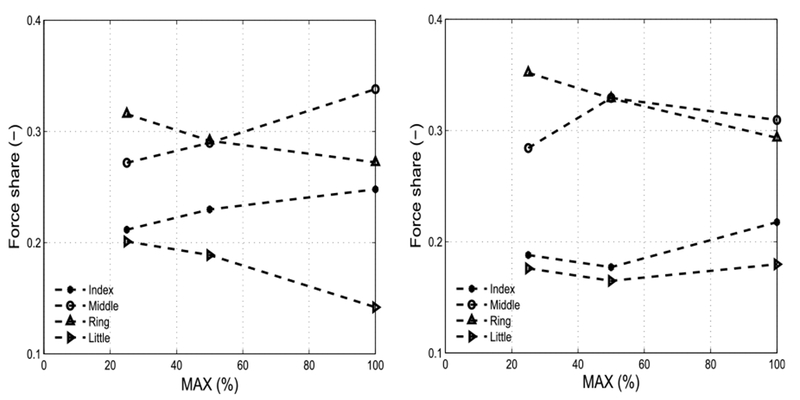
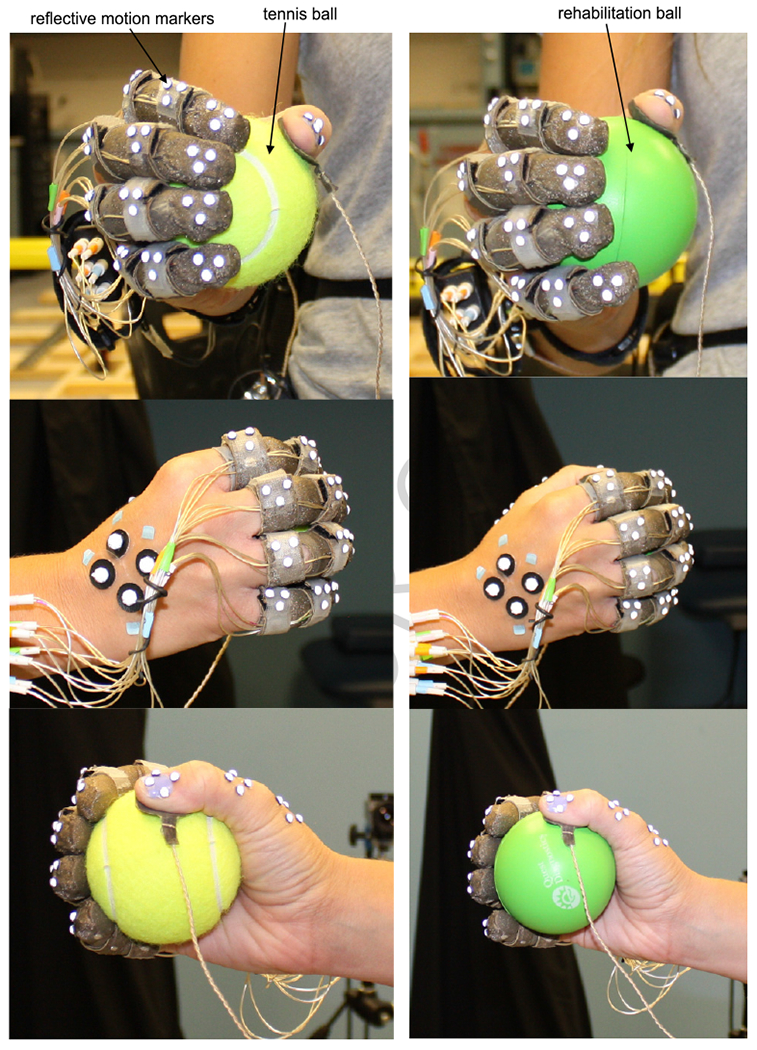
Description:The rehabilitation squeeze ball is a popular device to help strengthen the hand, fingers and forearm muscles. The distributions of the contact pressure in the interface between the therapy ball and hand/fingers can affect the joint moment of each of the individual fingers, thereby affecting rehabilitation effects. In the current study, we evaluated the contact force distributions on the fingers when gripping a spherical object. Eight female adults [age 29 (9.1) years, mass 64.6 (7.1) kg, height 163.5 (1.9) cm, hand length 17.2 (0.7) cm] participated in the study. Contact force sensors were attached to the middle of the palmar surfaces of the distal, middle, and proximal phalanges of the four fingers in the longitudinal direction. In order to evaluate the effects of the ball stiffness on the contact force distributions on the fingers, subjects were requested to perform quasi-static gripping on a standard tennis ball and on a rehabilitation ball. The tennis ball is much stiffer and experiences smaller deformation under compression compared to the rehabilitation ball. We analyzed the force share among the distal, middle, and proximal finger segments, when subjects gripping balls of different stiffnesses (tennis ball vs. rehabilitation ball) and at three different grip efforts. Our results indicated that the grip force is contributed about 60% and 40% by the middle/ring fingers and by the index/little fingers, respectively. These characteristics are independent of the grip force levels and stiffness of the contact surface.
-
Subjects:
-
Source:Biomed Mater Eng. 29(5):629-639
-
DOI:
-
Pubmed ID:30400076
-
Pubmed Central ID:PMC6388416
-
Document Type:
-
Funding:
-
Genre:
-
Volume:29
-
Issue:5
-
Collection(s):
-
Main Document Checksum:urn:sha-512:edbd76765c5737207c16f44161586e5d0c949ce48116c03a8b9242c0d3442ea60400455cc71e88ac7f9ec783ab28b1289115da4cfda6a02fa43b9462f49a072a
-
Download URL:
-
File Type:
 [PDF
- 868.96 KB
]
[PDF
- 868.96 KB
]
Supporting Files

File Language:
English
ON THIS PAGE

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
CDC STACKS serves as an archival repository of CDC-published products including
scientific findings,
journal articles, guidelines, recommendations, or other public health information authored or
co-authored by CDC or funded partners.
As a repository, CDC STACKS retains documents in their original published format to ensure public access to scientific information.
As a repository, CDC STACKS retains documents in their original published format to ensure public access to scientific information.
You May Also Like
COLLECTION
CDC Public Access