A Survey of Phase Variable Candidates of Human Locomotion
Supporting Files

-
2014
File Language:
English
Details
-
Alternative Title:Conf Proc IEEE Eng Med Biol Soc
-
Personal Author:
-
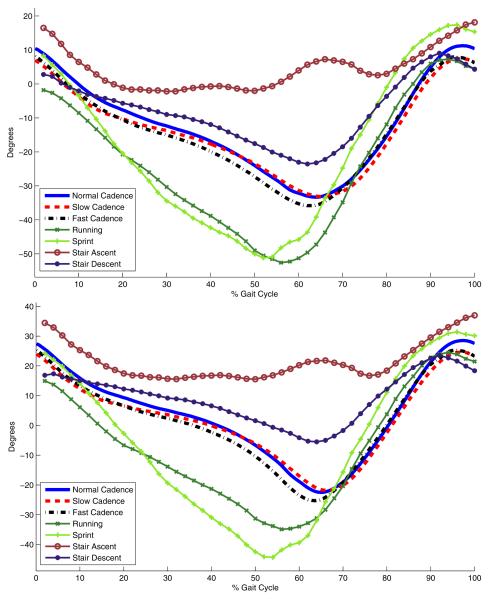
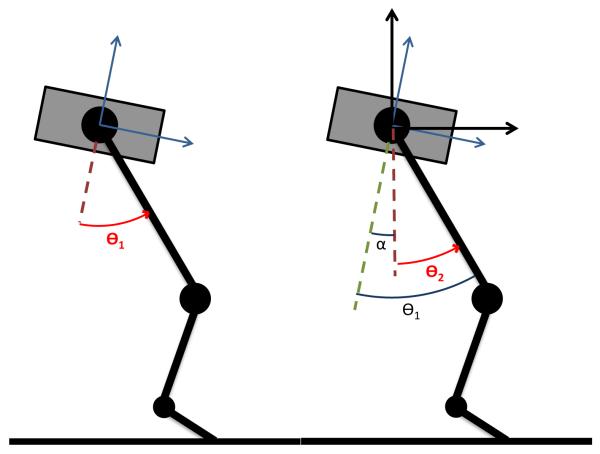
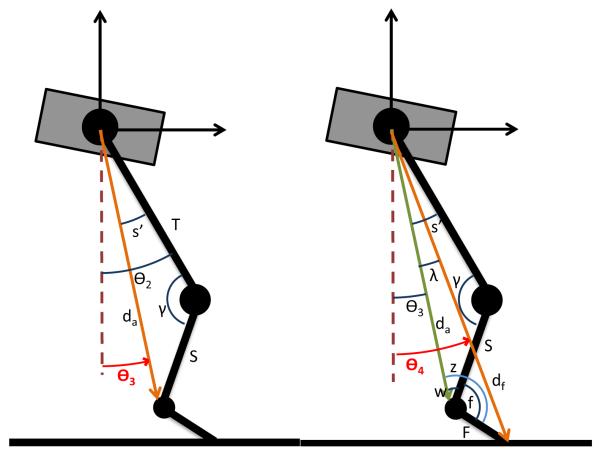
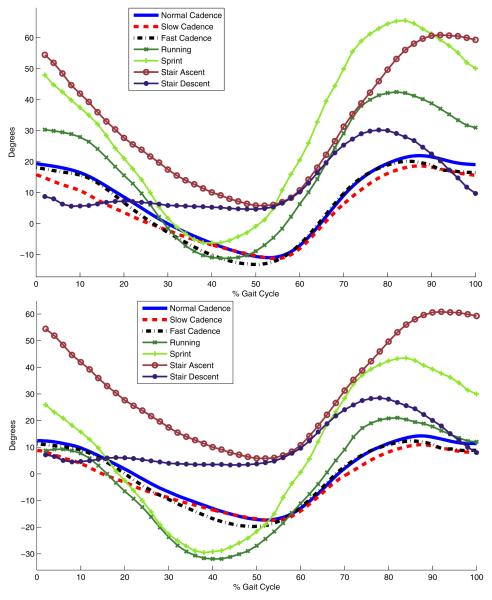
Description:Studies show that the human nervous system is able to parameterize gait cycle phase using sensory feedback. In the field of bipedal robots, the concept of a phase variable has been successfully used to mimic this behavior by parameterizing the gait cycle in a time-independent manner. This approach has been applied to control a powered transfemoral prosthetic leg, but the proposed phase variable was limited to the stance period of the prosthesis only. In order to achieve a more robust controller, we attempt to find a new phase variable that fully parameterizes the gait cycle of a prosthetic leg. The angle with respect to a global reference frame at the hip is able to monotonically parameterize both the stance and swing periods of the gait cycle. This survey looks at multiple phase variable candidates involving the hip angle with respect to a global reference frame across multiple tasks including level-ground walking, running, and stair negotiation. In particular, we propose a novel phase variable candidate that monotonically parameterizes the whole gait cycle across all tasks, and does so particularly well across level-ground walking. In addition to furthering the design of robust robotic prosthetic leg controllers, this survey could help neuroscientists and physicians study human locomotion across tasks from a time-independent perspective.
-
Subjects:
-
Source:Conf Proc IEEE Eng Med Biol Soc. 2014:4017-4021
-
Pubmed ID:25570873
-
Pubmed Central ID:PMC4288014
-
Document Type:
-
Funding:
-
Volume:2014
-
Collection(s):
-
Main Document Checksum:urn:sha-512:59f6ffeeaed4df2bf39f8312ada79229c9e3d06243401a4378865dff5018fd0b4a335fb880ff78dd36383ea795ad32f2408ac070df108bacf414c81abcb4a7b6
-
Download URL:
-
File Type:
 [PDF
- 1.19 MB
]
[PDF
- 1.19 MB
]
Supporting Files

File Language:
English
ON THIS PAGE

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
CDC STACKS serves as an archival repository of CDC-published products including
scientific findings,
journal articles, guidelines, recommendations, or other public health information authored or
co-authored by CDC or funded partners.
As a repository, CDC STACKS retains documents in their original published format to ensure public access to scientific information.
As a repository, CDC STACKS retains documents in their original published format to ensure public access to scientific information.
You May Also Like
COLLECTION
CDC Public Access