Distributed Coordination of Heterogeneous Agents Using a Semantic Overlay Network and a Goal-Directed Graphplan Planner
Supporting Files

-
May 21 2013
File Language:
English
Details
-
Alternative Title:PLoS One
-
Personal Author:
-
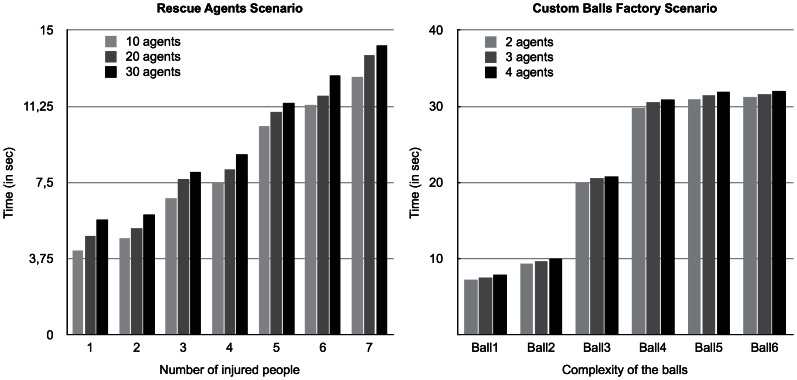
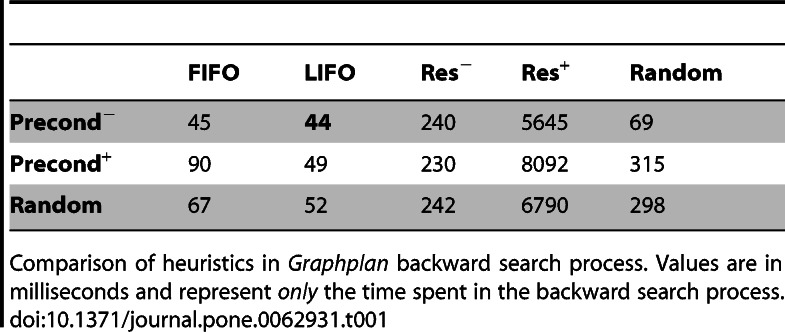
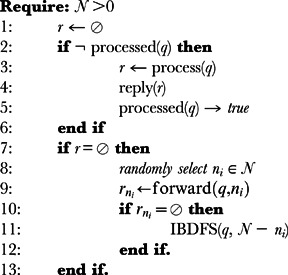
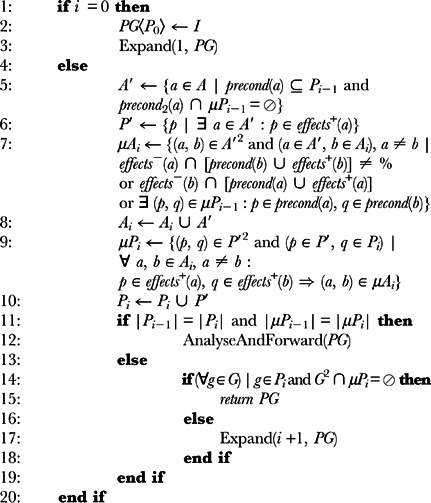
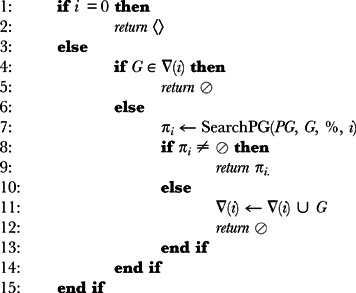
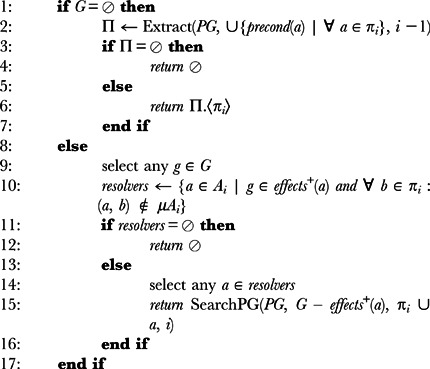
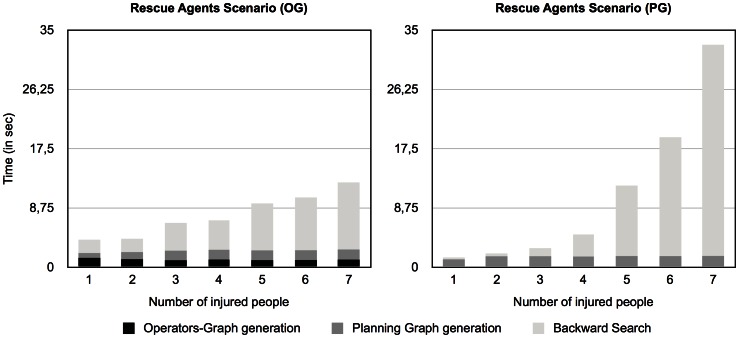
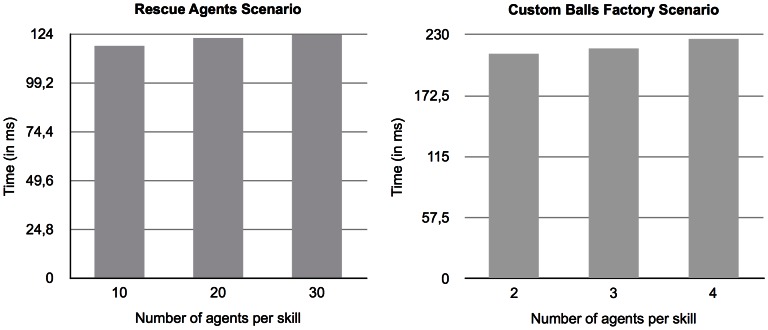
Description:In this paper, we describe a distributed coordination system that allows agents to seamlessly cooperate in problem solving by partially contributing to a problem solution and delegating the subproblems for which they do not have the required skills or knowledge to appropriate agents. The coordination mechanism relies on a dynamically built semantic overlay network that allows the agents to efficiently locate, even in very large unstructured networks, the necessary skills for a specific problem. Each agent performs partial contributions to the problem solution using a new distributed goal-directed version of the Graphplan algorithm. This new goal-directed version of the original Graphplan algorithm provides an efficient solution to the problem of "distraction", which most forward-chaining algorithms suffer from. We also discuss a set of heuristics to be used in the backward-search process of the planning algorithm in order to distribute this process amongst idle agents in an attempt to find a solution in less time. The evaluation results show that our approach is effective in building a scalable and efficient agent society capable of solving complex distributable problems.
-
Subjects:
-
Source:PLoS One. 2013; 8(5).
-
Pubmed ID:23704885
-
Pubmed Central ID:PMC3660390
-
Document Type:
-
Funding:
-
Volume:8
-
Issue:5
-
Collection(s):
-
Main Document Checksum:urn:sha256:b9474160575d4a6267b26b31b093d9488ef9f843f1d3565c40156e308d30f988
-
Download URL:
-
File Type:
 [PDF
- 842.49 KB
]
[PDF
- 842.49 KB
]
Supporting Files

File Language:
English
ON THIS PAGE

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
CDC STACKS serves as an archival repository of CDC-published products including
scientific findings,
journal articles, guidelines, recommendations, or other public health information authored or
co-authored by CDC or funded partners.
As a repository, CDC STACKS retains documents in their original published format to ensure public access to scientific information.
As a repository, CDC STACKS retains documents in their original published format to ensure public access to scientific information.
You May Also Like
COLLECTION
CDC Public Access