A literature review on safety perception and trust during human-robot interaction with autonomous mobile robots that apply to industrial environments
Supporting Files

-
2024
File Language:
English
Details
-
Alternative Title:IISE Trans Occup Ergon Hum Factors
-
Personal Author:
-
Description:Introduction:
Autonomous mobile robots are rapidly emerging in the workplace, which potentially creates new hazards for human workers that interact with them.
Purpose:
We aimed to systematically review previous research on human-robot interaction with autonomous mobile robots that apply to industrial environments, and to identify research needs to improve worker safety and trust.
Methods:
We completed a systematic review following the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) methodology. We focused on articles that contained experiments with human participants and that included findings associated with improving safety and/or trust of workers who interact with mobile robots in industrial environments. We identified 50 articles that fit inclusion/exclusion criteria for the review.
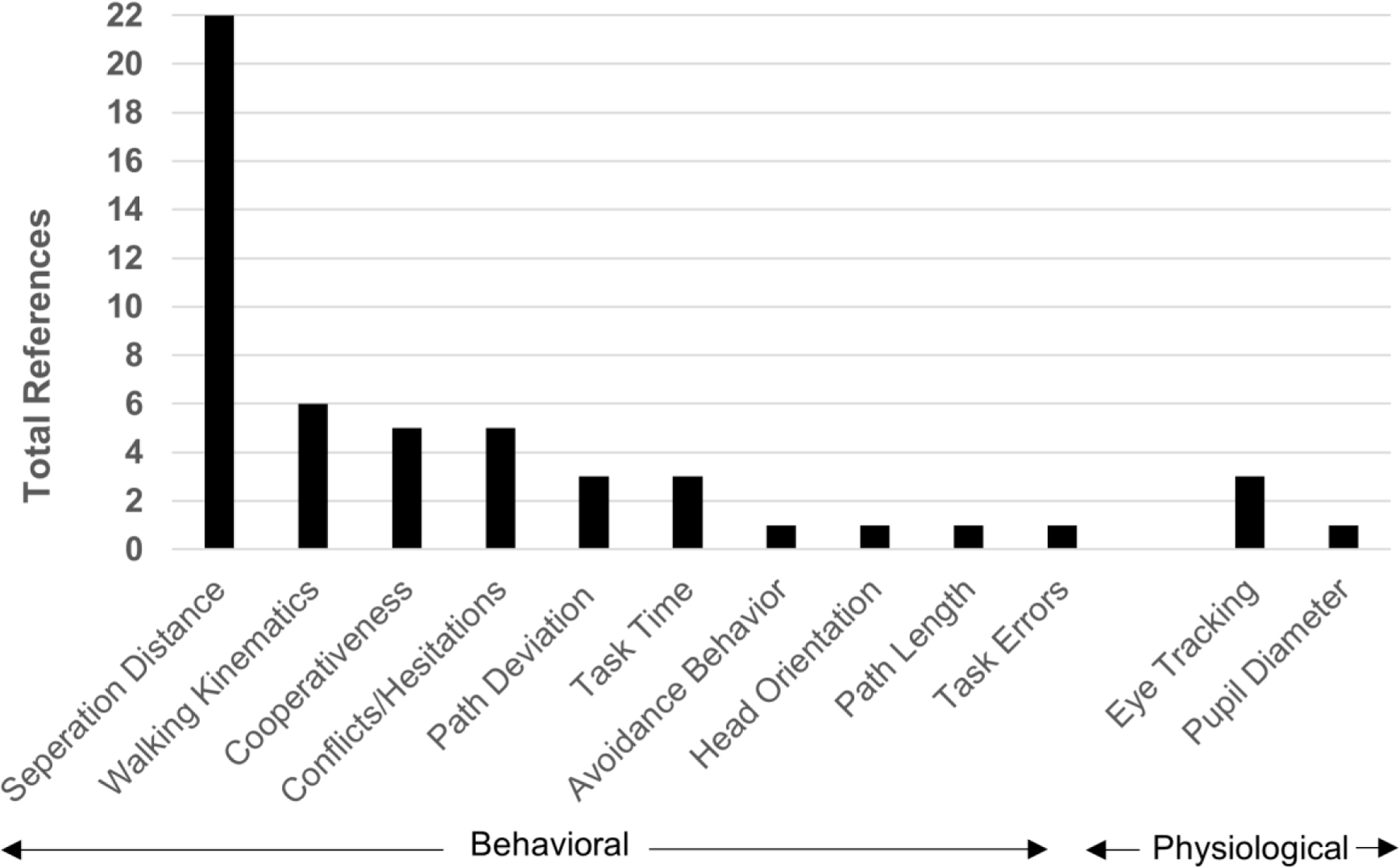
Results:
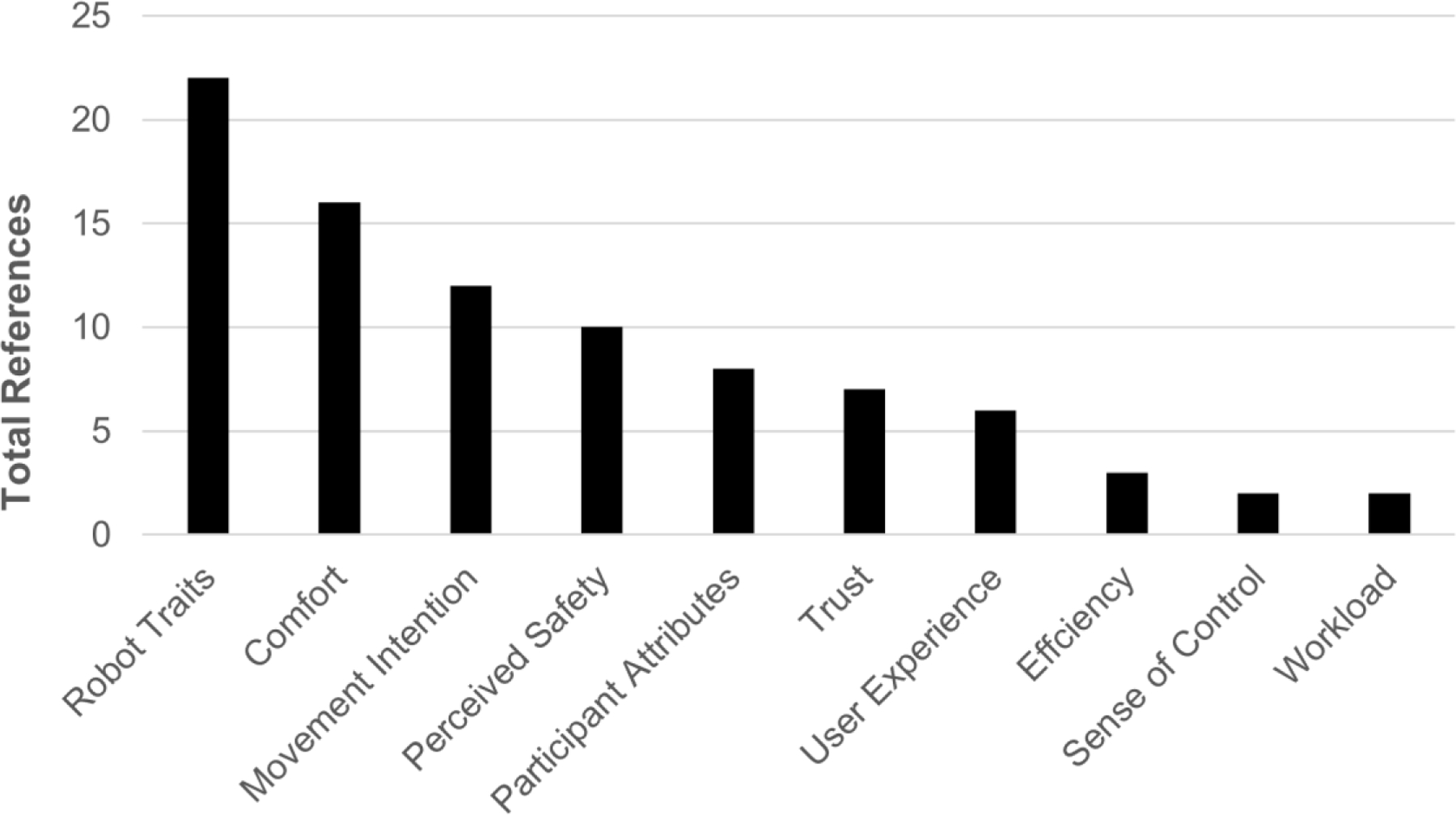
Almost all of the reported experiments were conducted in a controlled laboratory setting. There were 27 different types of autonomous mobile robots. Only two studies involved industrial mobile robots that were commercially available and could be implemented in an industrial environment. Most studies used questionnaires, with the most common topic relating to participant perceptions of various robot traits, while few directly evaluated perceived safety and trust using questionnaires. Behavioral and physiological assessment methods were used in 70 and 8% of the studies, respectively. Separation distance between the participant and robot was the most common behavioral assessment method. A variety of robot characteristics were found to have a significant effect on human perception of safety and other similar concepts.
Conclusions:
Future research requires rigorous reporting of participant demographics and experience level with robots. We found that 34 and 44% of references failed to report the mean age of their participant sample and their experience with robots, respectively. Among several gaps that we identified in the literature were a lack of field experiments, sparse research involving multiple mobile robots, and limited use of industrial mobile robots in experiments with human participants.
-
Subjects:
-
Keywords:
-
Source:IISE Trans Occup Ergon Hum Factors. 12(1-2):6-27
-
Pubmed ID:38190192
-
Pubmed Central ID:PMC11076167
-
Document Type:
-
Funding:
-
Volume:12
-
Collection(s):
-
Main Document Checksum:urn:sha-512:20c70f62745d25dd33a15e16b6a32beaf486b27d39db72be0f6a6eed26e654316c17df5a0ff712f0f05ce2f93cd03e745c314f133e9c6f8bb39bd3c5059e686d
-
Download URL:
-
File Type:
 [PDF
- 535.03 KB
]
[PDF
- 535.03 KB
]
Supporting Files

File Language:
English
ON THIS PAGE

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
CDC STACKS serves as an archival repository of CDC-published products including
scientific findings,
journal articles, guidelines, recommendations, or other public health information authored or
co-authored by CDC or funded partners.
As a repository, CDC STACKS retains documents in their original published format to ensure public access to scientific information.
As a repository, CDC STACKS retains documents in their original published format to ensure public access to scientific information.
You May Also Like
COLLECTION
CDC Public Access